모터의 전류 제어나 속도 제어에 사용되는 비례 적분 제어기에서 원하는 응답 특성을 얻기 위한 게인 선택 방법 주파수 응답 특성게인을 분석하여 원하는 응답을 갖도록 선택해야 합니다.
이것은 일반적으로 그러한 제어 시스템을 설계할 때의 경우입니다. 안정성, 응답성, 정상 상태 오류세 가지 요소를 고려해야 합니다.
0. 주파수 응답 특성은 무엇입니까?
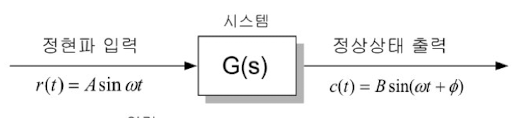
주파수 응답은 일정한 진폭의 정현파 입력 신호 r
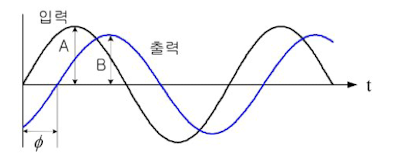
입력 신호의 주파수에 따라 출력 신호의 크기와 위상이 입력 신호와 다를 수 있으며 주파수 응답은 그 차이의 정도를 나타냅니다.
출력은 전달 함수 G(s)에 따라 달라집니다.
(1) 주파수 전달 기능

시스템의 전달함수 G(s)에서 sjw와 서로 다른 주파수 w에 따라 계산된 G(jw)의 크기와 위상이 시스템의 주파수 응답이 된다고 하자.
시스템의 주파수 응답은 주파수 이득(주파수 응답 함수의 크기)과 위상차(주파수 응답 함수의 각도(파이))로 구성됩니다.
전달 함수는 입력과 출력의 비율이므로 주파수 전달 함수의 크기와 각도는 주파수 이득과 위상차가 됩니다.
보드 플롯은 이러한 응답 속성을 시각적으로 표현한 것입니다.
(2) 벡터 궤적
벡터 궤적은 주파수 함수에서 w의 값을 0에서 무한대로 변환하면서 크기와 위상을 표현합니다.
1. 비례 요인
지(들) = 케이 => 지(jw) = 케이
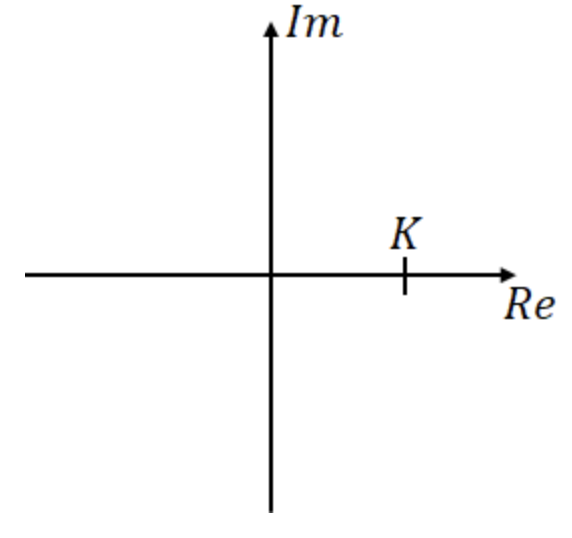
jw항이 없기 때문에 K가 양수이면 위와 같이 복소평면에 표현된다.
2. 미분 요인
지(s) = s => 지(jw) = jw
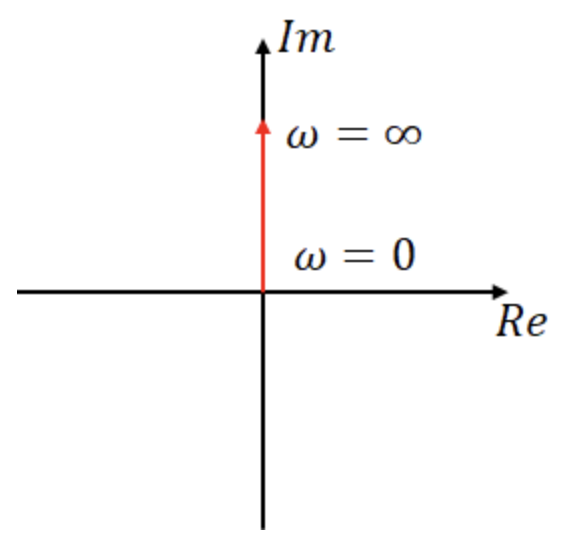
위와 같이 Im 축에 그려진 w 항이 있습니다.
3. 적분 요인
G(s) = 1 / s => G(jw) = 1 / jw = – j * 1 / w
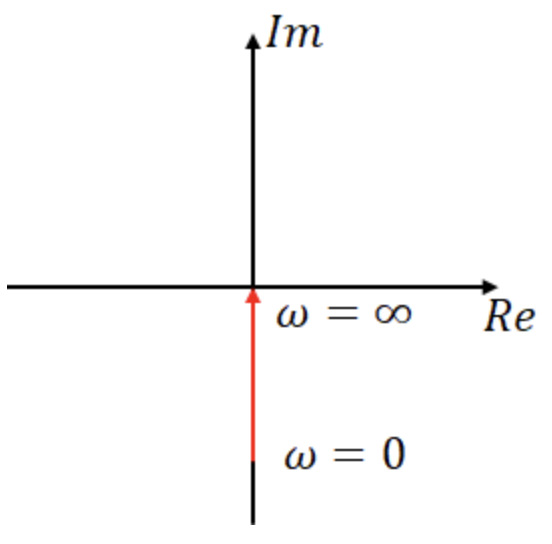
w = 0에서 무한대이고 w가 무한대로 가는 경향이 있으므로 0으로 수렴합니다.
4. 1. 지연 요인
1. 안정성
폐루프의 안정성은 폐루프 전달 함수의 s-평면에서 특성 방정식의 근의 위치 또는 특성 방정식의 각 항의 부호를 검사하는 Routh-Hurwitz 안정성 기준으로 알 수 있습니다.
또한 극좌표에서 개루프 시스템의 주파수 특성을 이용한 Nyquist 안정성 결정 방법으로 안정성을 평가할 수 있다.
여기서 설명할 주파수 응답을 사용하여 컨트롤러를 설계할 때 제어 루프의 안정성은 제어 전달 함수에 대한 주파수 응답 곡선, 즉 보드 다이어그램에 의해 결정됩니다. 맞긴 받기 그리고 위상 에지보고 판단할 수 있습니다.
(1) 이익률
시스템이 불안정해지기 전에 시스템의 진폭 응답을 얼마나 증가시킬 수 있는지 나타냅니다.
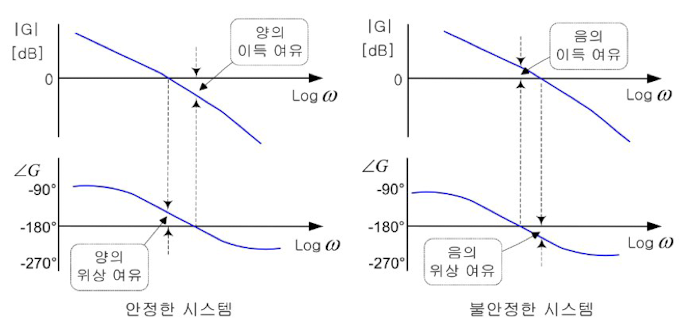
위 그림의 보드 플롯에서 보듯이 게인 |G| 위상 Phi = 180도가 0dB 미만인 위상 교차 주파수에서 이 경우 시스템은 안정적입니다.